

Принципы построения схем вакуумметров
Принципы построения схем вакуумметров
Классифицируя приборы по виду выходной величины Пирани показал , что электрические схемы вакуумметров, чувствительными элементами которых являются термометры сопротивления, могут строиться, основываясь на трех различных принципах.
По схеме, основанной на первом принципе, выходной величиной является сопротивление датчика, а величина тока поддерживается неизменной при всех давлениях. Во второй схеме выходной величиной является тощ а подведенное к датчику напряжение поддерживается постоянным. И, наконец, в третьей схеме сопротивление чувствительного элемента поддерживается постоянным, а мерой давления является мощность его рассеяния.
Практическое осуществление указанных схем принципиально возможно при помощи метода непосредственной оценки или метода сравнения. Первый метод заключается в последовательном преобразовании измеряемой величины в отклонение подвижной части измерителя. Второй — в сравнении выходных сигналов двух,, по возможности идентичных, преобразователей с последующим преобразованием сигнала сравнения в отклонение подвижной системы измерителя.
Основные черты метода непосредственной оценки проиллюстрированы выше на примере разработки датчика давления, а построение схемы в целом, основанной на этом методе, сводится к последовательному присоединению дополнительных звеньев. Например, по схеме вакуумметра, выходной величиной которого является сопротивление (первый принцип Пирани), изменение последнего может быть преобразовано в механическое перемещение движка реостата, включенного последовательно с датчиком. Тогда положение движка может указывать на величину измеряемого давления. По схеме, основанной на втором принципе, ток I, являющийся выходной величиной датчика, непосредственно преобразуется в угловое отклонение стрелки измерительного прибора. Аналогичное преобразование возможно и в схем$ прибора, выходной величиной датчика которого является мощность Р=12.
Таким образом, основной ячейкой электрической схемы прибора непосредственной оценки является простейшая последовательная цепь: «датчик — линейное сопротивление». Простоте этой схемы сопутствует крупный ее недостаток, заключающийся в повышенной чувствительности к помехам. Основными источниками помех являются колебания напряжения и температуры среды. Влияние помех оценивается чувствительностью к каждой из них по формуле:


Действие помех вызывает дополнительную погрешность, величина которой тем больше, чем меньше различие между чувствительностью звена к изменению основного параметра и сигнала помехи. Алгебраическая сумма погрешностей отдельных звеньев дает погрешность прибора в целом.
Значительно меньше подвержены помехам приборы, работающие по методу сравнения. В вакуумметрах метод сравнения обычно реализуется при помощи мостовой схемы, составленной из линейных сопротивлений и одного или двух преобразователей — датчиков. В практике получили распространение вакуумметры, основанные как на схеме уравновешенного (автоматического), так и неуравновешенного моста. Последние более просты, но им частично присущи те же недостатки, что и вакуумметрам, работающим по методу непосредственной оценки. Вакуумметры, работающие по схеме уравновешенных мостов, меньше подвержены влиянию помех, но их применение ограничивается техническими трудностями, которые возникают при выполнении устройств для автоматического поддержания равновесия. По схеме уравновешенного моста реализуется принцип постоянного сопротивления датчика. Что касается неуравновешенного моста, то ни один из указанных Пирани принципов в этой схеме полностью не выдерживается.
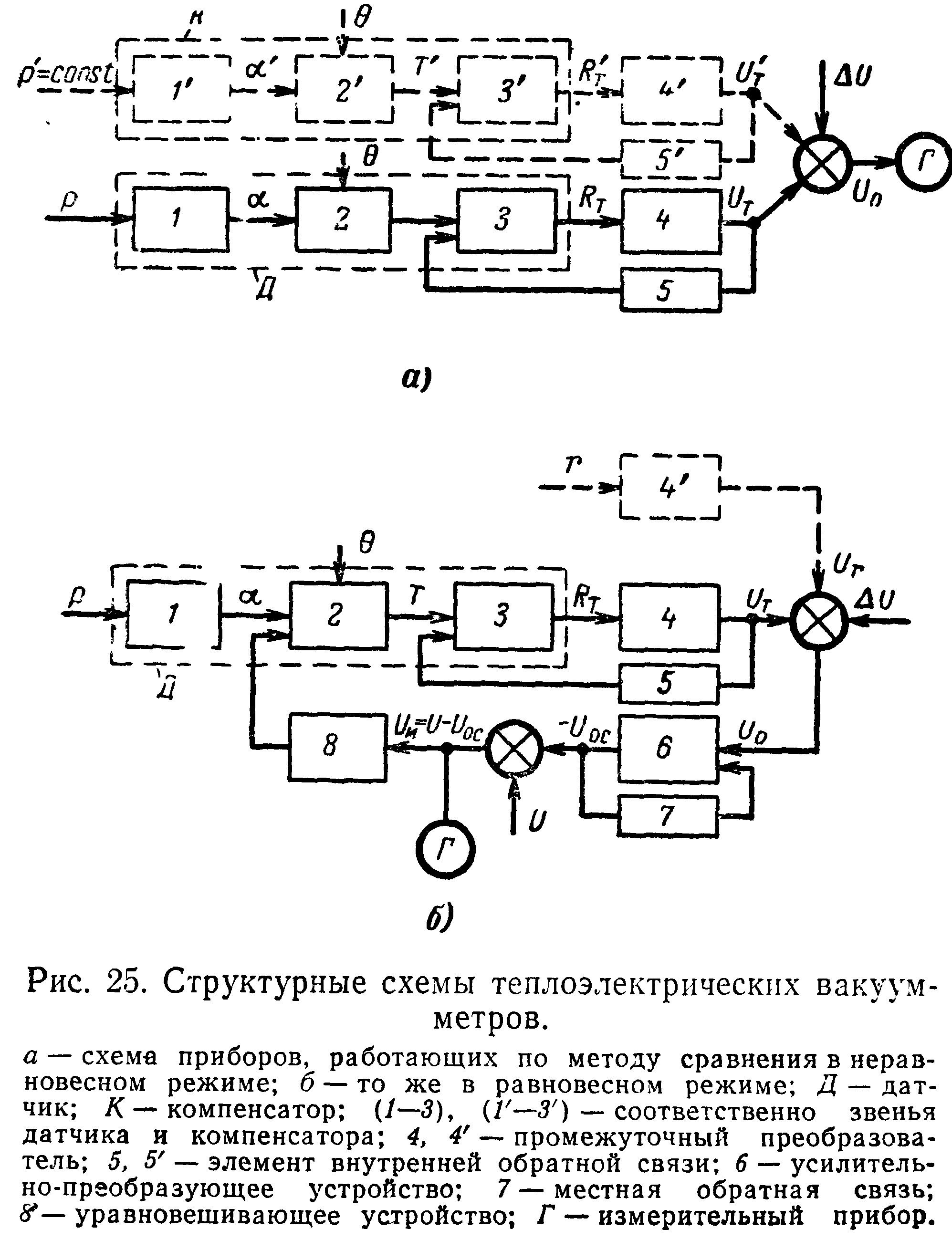
На рис. 25 изображены структурные схемы вакуумметров, работающих по методу сравнения в неравновесном (а) и равновесном (б) режимах. Из структурных схем видно, что в неуравновешенном мосте происходит автоматическая компенсация погрешности, вызванной колебаниями температуры среды 0 . Колебания питающего напряжения воспринимаются прибором как изменения контролируемого параметра — давления. В связи с этим приборы, работающие по схеме неуравновешей-ного моста, требуют стабилизированного источника питания. Кроме того, они имеют резко выраженную неравномерность шкалы и вследствие неизотермичности условий работы датчика в них ограничены возможности для повышения быстродействия.
В приборах, основанных на схеме уравновешенного моста, содержащего, кроме рабочего датчика, датчик-компенсатор в смежном плече, происходит автоматическая компенсация погрешности, которая вызывается как колебаниями температуры среды, так и колебаниями питающего напряжения. Основным критерием, характеризующим автоматические вакуумметры, является порог чувствительности — это то наименьшее значение давления Рмин, которое способно привести в действие уравновешивающее устройство. Погрешность, вызванная порогом чувствительности, определяется отношением Рмин/Рном, где Рном — номинальное значение давления. Для уменьшения этой погрешности прибегают к усилению сигнала рассогласования. При этом коэффициент усиления усилителя ограничивается пределом устойчивости системы.
Таким образом, наиболее существенными преимуществами автоматических мостов по сравнению с неуравновешенными являются: нечувствительность к помехам,, возможность обеспечения изотермических условий работы датчика, что приводит к снижению его инерционности и более широкие возможности получения шкалы прибора, близкой к равномерной.
Чувствительность приборов, работающих как по методу непосредственной оценки, так и по методу сравнения, зависит не только от чувствительности их отдельных звеньев, но и от согласования их между собой. Решение этой задачи имеет свои особенности в каждом отдельном случае, однако общий принцип согласования вытекает из следующего.
Отсюда, приравняв нулю производную dPr/d/T==0, что будет соответствовать условию максимума потребляемой преобразователем мощности Рг, находим Rr = Ri. Следовательно, для вакуумметра, работающего по методу непосредственной оценки, условие максимальной отдачи мощности измерителю будет соответствовать равенству RT = r, где г — обычно внутреннее сопротивление измерительного прибора.
Аналогичные рассуждения справедливы и для параметрического преобразователя, включенного в одно из плеч моста. Для этой схемы вместо э. д. с. принимается напряжение холостого хода моста, а внутренним сопротивлением Ri является эквивалентное сопротивление плеч при замкнутой накоротко нагрузочной диагонали.
Расчет мостовых схем, как было показано в гл. 2, удобнее выполнять графоаналитическим методом.