

Структурная схема и динамические свойства вакуумметра
Структурная схема и динамические свойства вакуумметра
Основными показателями динамических свойств вакуумметра являются устойчивая работа системы автоматического поддержания постоянства сопротивления (температуры) чувствительного элемента и величины динамической погрешности в переходном режиме Определение условий, при которых система будет работать устойчиво, и численное определение динамической погрешности являются типичными задачами теории автоматического регулирования. Аналитическое решение этой задачи сводится к составлению структурной схемы прибора из отдельных динамических звеньев направленного действия и определения передаточной функции разомкнутой системы. Структурная схема вакуумметра, работающего по схеме моста с обратной связью, в самом общем виде изображена на рис. 25. Датчик прибора показан в виде трех последовательных звеньев 1—3, звено 4 является преобразователем величины сопротивления терморезистора RT в изменение приложенного к датчику напряжения UT (источник энергии, воздействующий на это звено, на схеме не показан).
Нелинейная зависимость между током и приложенным к терморезистору напряжением обусловливает возникновение внутренней обратной связи 5, охватывающей 4 и 3 звенья. Эта обратная связь положительна, так как увеличение приложенного к терморезистору напряжения приводит к возрастанию его температуры. в
Элементом сравнения являются смежные плечи моста, в которых сравниваются падения напряжения на датчике UT с падением напряжения Ur на активном сопротивлении.
Элементом главной обратной связи служит усилительно-преобразующее устройство, состоящее из двух каскадов полупроводникового усилителя и преобразователя в виде лампы накаливания и фоторезистора.

Усиленный и преобразованный в напряжение питания моста сигнал рассогласования воздействует на объект регулирования — терморезисторный датчик — таким образом, чтобы изменить его температуру. Это воздействие осуществляется преобразователем S, условно изображающим электрическую схему моста, составленную таким образом, что изменение питающего напряжения воспринимается датчиком как изменение коэффициента теплообмена а, либо как изменение температуры среды 6.
Коэффициент усиления усилителя главной обратной связи зависит от знака разбаланса измерительного моста, что является одной из причин возникновения в системе незатухающих колебаний. Для подавления таких колебаний и стабилизации коэффициента усиления применена гибкая обратная связь 7, охватывающая усилитель и преобразователь. Гибкая обратная связь составлена из конденсаторов Сь С2и резистора г6 (рис. 30).
Полученная структурная схема состоит из динамических звеньев направленного действия. В ряде случаев установившиеся процессы можно рассматривать в линейном приближении и получать количественные соотношения. Так, в результате линеаризации уравнения (111) для случая небольших изменений контролируемого параметра, когда (k—q)/&o< 0,1, для мостовой схемы с обратной связью, содержащей терморезистор, получена передаточная функция,где величины и индексом «О» обозначают их установившиеся значения.
Получим передаточную функцию для гибкой обратной связи. Приращение падения напряжения на фоторезисторе связано с током в диагонали моста (током, протекающем через переходное сопротивление /б.э эмиттер— база транзистора П15) следующим соотношением:



Отсюда при условии С1=С2 = С получим:

Теперь можно составить линеаризованную структурную схему прибора рис. 35, позволяющую проанализировать работу и рассчитать оптимальные величины элементов схемы.
Из структурной схемы видно, что в переходном процессе коэффициент усиления внешней обратной связи в момент приложения возмущения будет минимальным и при соответствующей настройке — выборе величины сопротивления Гб и емкости конденсаторов G и С2 — можно получить апериодический или колебательный процесс установления.

Выбор величины коэффициента усиления G усилителя должен удовлетворять двум условиям: обеспечить с требуемой точностью соблюдение изотермических условий в момент измерения и необходимое быстродействие.
Как на одно из важнейших достоинств схемы, работающей в режиме постоянной температуры, следует указать на ее линеаризующее действие: несмотря на нелинейность вольт-амперной характеристики терморезистора, его можно рассматривать как линейное сопротивление в широком диапазоне изменения тока, протекающего через него. Единственным нелинейным звеном в структурной схеме (рис. 35) является зависимость коэффициента рассеяния от величины давления газа. Установление и изучение этой зависимости в широком диапазоне давлений является одной из актуальнейших задач практики и теории теплообмена в разреженных газах. Необходимые сведения для проектирования прибора в настоящей работе были получены экспериментально.
Аналитическое определение погрешности бд — задача сложная, так как для ее решения требуется знать вид аналитической зависимости %=Пт). Для экспериментального определения бд возникает необходимость измерять давление прибором, инерционностью которого можно было пренебречь. Кроме того, практически не представляется возможным изменять величину давления в процессе измерений по заранее заданному закону.
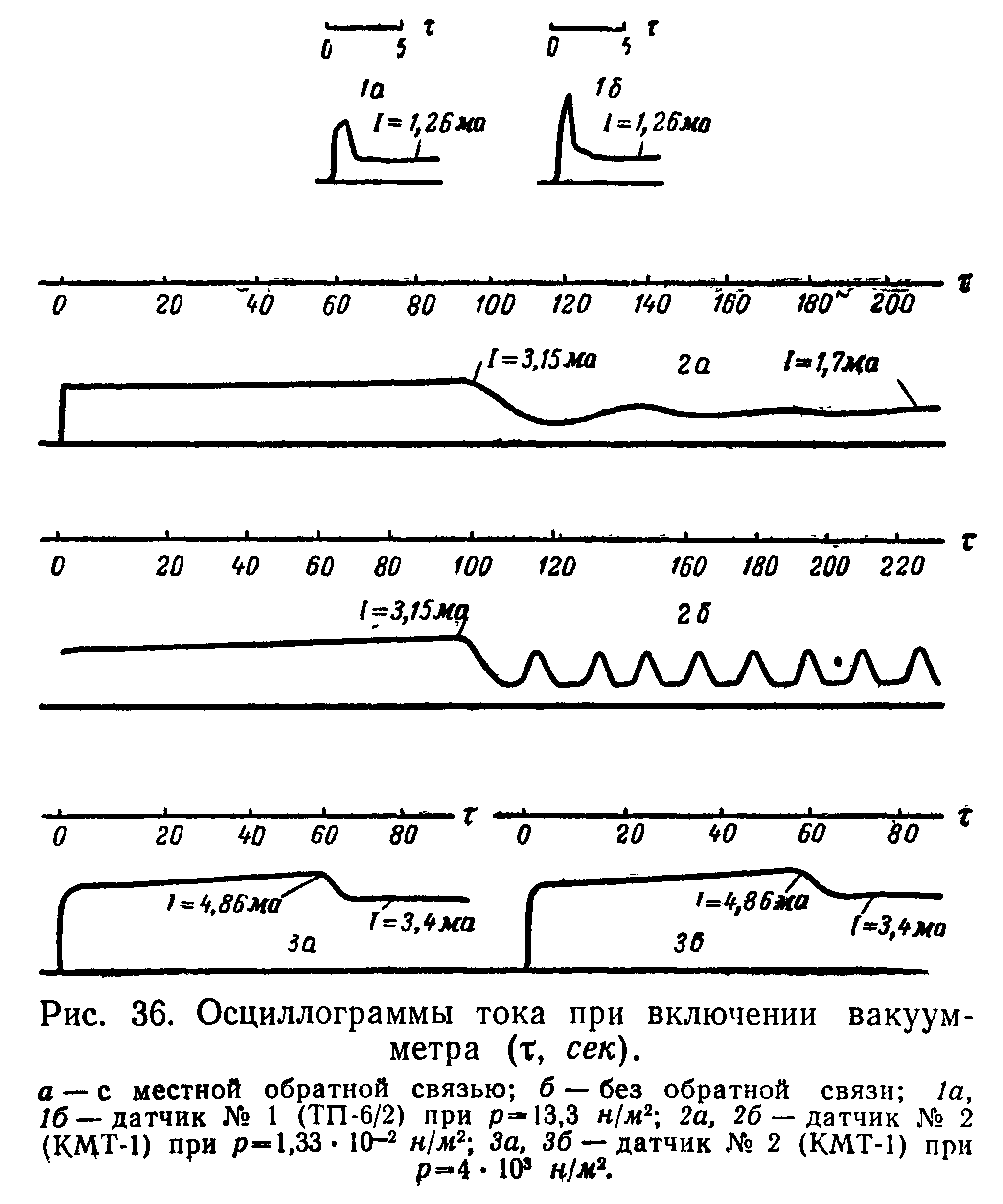
В связи с указанными трудностями определения величин бд для качественной оценки динамических свойств вакуумметра экспериментально сняты осциллограммы прибора в переходном режиме при включении его в работу (рис. 36).
Характер полученных осциллограмм позволяет считать, что динамические свойства вакуумметра полностью определяются инерционностью датчика.