

Магнитные электронные преобразователи
Магнитные электронные преобразователи
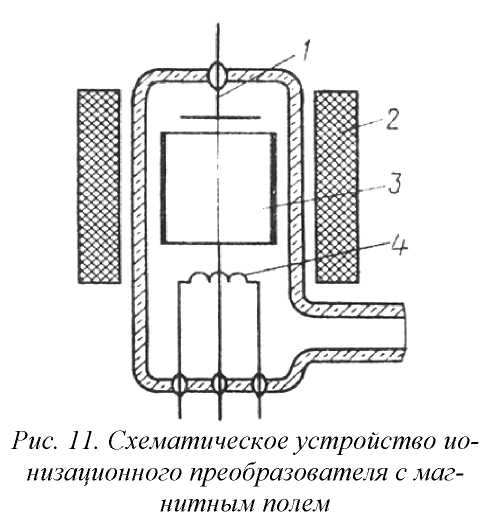
Магнитные электронные преобразователи способны измерять как достаточно высокие (около 102 Па), так и сверхнизкие (до 10-11 Па и ниже) давления. Принцип их действия основан на зависимости тока самостоятельного газового разряда в скрещенных магнитном и электрическом полях от давления. Ионизация газа в них осуществляется не термоэлектронами, эмитированными накаленным катодом, а обеспечивается и поддерживается благодаря разряду между холодными электродами. Принцип работы магнитного электроразрядного преобразователя можно понять из упрощенной схемы, изображенной на рис. 12.
В манометрической лампе имеются всего два электрода: катод, которым является металлический корпус 1 прибора и анод 2, выполненный из металла в форме кольца. Вдоль оси анода создается магнитное поле напряженностью в несколько тысяч ампер на метр, создаваемое магнитом 4.
Через балластный резистор 3, ограничивающий разрядный ток, на анод подается высокое положительное напряжение (2,5-3 кВ). В результате этого при достаточно низком давлении между анодом и катодом (корпусом) возникает самостоятельный тлеющий разряд. Балластный резистор, ограничивая ток разряда, препятствует его переходу в дуговой.
Образовавшиеся при ионизации положительные ионы перемещаются к корпусу (катоду) и нейтрализуются на нем. Обладая значительной энергией, положительные ионы при встрече с корпусом выбивают из его материала вторичные электроны, которые, двигаясь к аноду, также ионизируют газ.

Ток положительных ионов на катод и ток вторичных электронов с него в сумме численно равны электронному току в цепи анода. В результате ионизации газа возникает электрический разряд, ток которого в достаточно широком диапазоне зависит от давления. Зависимость тока разряда манометра I от давления газа Р может быть выражена приближенной формулой: где Е — анодное напряжение; Uo — минимальное напряжение между электродами датчика (корпусом и анодом) при наибольшем измеряемом давлении; R6 — внешнее балластное сопротивление; k — коэффициент, определяющий чувствительность датчика; n — показатель степени (обычно n = 0,9 — 1,15).
Все разновидности магнитных электроразрядных датчиков могут быть классифицированы по взаимному направлению электрического и магнитного полей на две большие группы: датчики с параллельными электрическим и магнитным полями (датчики Пеннинга) и датчики со скрещивающимися полями. Последняя группа в свою очередь может быть подразделена на магнетронные и инверсно-магнетронные.
На рис. 13 показаны принципиальные схемы датчиков всех типов и траектории движения электронов в них. Для всех магнитных электрораз-рядных датчиков характерно то, что прямой пролет электрона на анод запрещен благодаря применению значительного по величине магнитного поля.

В датчике с параллельными электрическим и магнитным полями (рис. 13 а) доминирует возвратно-поступательное движение электронов вдоль оси, причем по мере приближения к аноду электрон приобретает одновременно циклоидальный характер движения. В магнетронной и инверсномагнетронной конструкциях электрон движется по циклоиде (рис. 13 б) и гипоциклоиде (рис. 13в).
При своем движении от столкновения до столкновения электроны проходят громадные расстояния, исчисляемые в диапазоне высокого вакуума километрами.
Магнитные преобразователи, так же как и электронные, имеют неодинаковую чувствительность к различным газам. Коэффициенты относительной чувствительности магнитных преобразователей Яг = Кг/Кв для ряда газов представлены в табл. 3.
Таблица 3
Относительная чувствительность магнитных преобразователей
|
Газ |
Кг/Кв |
Газ |
Кг/Кв |
Газ |
Кг/Кв |
|
N2 |
1 |
Ar |
1,4 |
Xe |
3,5 |
|
H2 |
0,43 |
CO2 |
1,3 |
Ne |
0,26 |
|
He |
0,15 |
O2 |
0,86 |
Быстрота откачки колеблется для различных преобразователей в зависимости от рода газа и режимов работы в пределах от 10-2 до 1 л/с, что значительно больше, чем для электронных.

Это приводит к увеличению погрешности измерений при наличии вакуумного сопротивления между преобразователем и вакуумной камерой.
Преимуществом магнитного преобразователя перед электронным является более высокая надежность в работе в связи с заменой накаленного катода холодным, а недостатком — нестабильности, связанные с колебаниями работы выхода электронов при загрязнении катодов.
Эти нестабильности особенно заметны при работе преобразователя в вакуумных системах с парами масла, продукты разложения которого при ионной бомбардировке и масляные диэлектрические пленки, покрывающие поверхности электродов, могут в несколько раз изменить постоянную преобразователя. Во избежание этого необходимо применять самоочищающиеся магнитные преобразователи, работающие на переменном токе. В таких преобразователях катод и анод меняются местами в соответствии с полупериодами питающего напряжения, а очистка их поверхностей осуществляется ионной бомбардировкой.
Отечественной промышленностью выпускается большое количество магнитных вакуумметров.